Best Senior Design Projects
One winning team from each department was recognized at the Order of the Engineer ceremony on Saturday, December 17, 2022.
Winners received a custom North Face full-zip fleece jacket compliments of GE Healthcare and the College of Engineering & Applied Science.
Click on each project below to see objective, team members, advisor(s), and presentation dates/times.
Program Sponsor

Biomedical Engineering

Mec-CP
Objective: Mec-CP is a pain relief device for uterine & ovarian cramps & chronic pain. The goal is to override pain signals with TENS, doing so with Bluetooth and wireless controls in a discrete & inclusive manner.
Team Members:
- Morgan Connaughton
- Emily Cory
- Sabrina Edwardson
- Kelly McElvain
- Sofia Pardinas
Advisor: Jacob Rammer, Assistant Professor Biomedical Engineering

Project Presentation:
Tuesday, December 13, 2022
1:30-4:30 pm CST in EMS E250
Project Findings:
Those with a uterus may experience acute to chronic pain associated with primary (menstrual cramps) and secondary (endometriosis) dysmenorreha. These conditions impair health-related quality of life, resulting in but not limited to the following: nausea, fatigue, headaches, sleep disturbances, and increased risk for depression and anxiety. In certain cases of secondary dysmenorrhea, patients may experience infertility and damage to reproductive organs. There are limited pain management care and treatment alternatives to analgesics that both minimize the limitations and maximize the benefits of being affordable, easily accessible, portable, inclusive, and discrete. Mec-CP intends to do both: overcome current limitations and provide a beneficial, advantageous alternative pain relief option for targeted users.
Mec-CP is a discrete, inclusive, affordable, and easily accessible device that uses transcutaneous electric nerve stimulation (TENS) as a form of pain relief for those with dysmenorrhea. For this device to successfully relieve pain associated dysmenorrhea and avoid infringement on current patents, the device should use a rectangular biphasic waveform to send 100us pulses at a frequency of 65-100Hz with a voltage output of 70Vpp with a 500Ohm load. Future directions include the device with an application for Bluetooth controls, a heating pad element, automatic retractable cords, power consumption and cost reduction, increased battery life and discreteness.
MyoWay
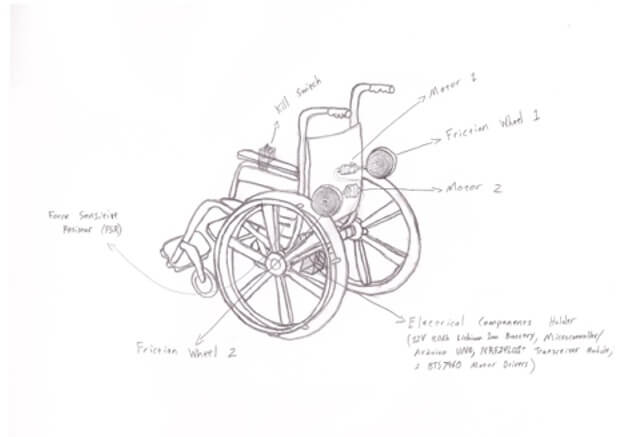
Objective: The device is designed to be attached to a manual wheelchair to transform it into an electric wheelchair which can be operated using EMG signals via a Myo Band device.
Team Members:
- Nada Almuallem
- Emily Jurek
- Osama Nemer
- Cole Piche
- Teresa Turner
Advisor: Jacob Rammer, Assistant Professor Biomedical Engineering

Project Presentation:
Tuesday, December 13, 2022
1:30-4:30 pm CST in EMS E250
Project Findings:
The MyoWay design group aims to create a cost-effective power assist device for a wheelchair which operates using EMG commands. Other specifications required the device to move an individual of up to 250 lbs 2-3 miles per hour, to have an emergency power switch in case of malfunction, and to integrate a pressure sensor into the wheelchair seat as an extra safety measure so the wheelchair could not be operated while the user was away from it.
Given the limited budget and time, the MyoWay group was successful in designing and implementing a device that met the required specifications. The device is controlled via the Myo Armband, which uses a 6-axis motion sensor and highly sensitive EMG sensors to track the users hand gestures. The gestures were translated into motor motion through the use of the MyoDuino program that enabled the microcontroller to communicate with the Myo Armband, the microcontroller could then relay that signal to two motor drivers, each controlling a single motor. The addition of a kill switch and a Force Sensitive Resistor increased user safety. Through the use of friction wheels, which were 3D printed and covered with rubber to optimize friction, the motors could transfer their spin to the rear wheels of the wheelchair and drive the wheelchair in a forward, backward, or stopping motion. All of this gives those in need of a powered wheelchair a cheaper alternative.
Migraine Cap
Objective: The goal is to create a migraine cap that can alleviate as much pain as possible. By providing both massage therapy and cooling/heating features, clients should feel better after/during usage.
Team Members:
- Andrea Alonso
- Bryce Alvarez
- Delight Flores
- Caleb Moua
- Josiah Vang
- Rose Yang
Advisor: Jacob Rammer, Assistant Professor Biomedical Engineering

Project Presentation:
Tuesday, December 13, 2022
1:30-4:30 pm CST in EMS E250
Project Findings:
The initial intent of this medical device was to alleviate pain and discomfort for users who may suffer from chronic or temporary migraines. By implementing massaging and cooling features, this migraine cap strives to achieve those demands.
From the team findings, they discovered that the most efficient method to reduce pain is to have the massaging dc motors placed on the temporal lobes. The team was able to execute this feature within the semester, and have them powered by 9V batteries that is contained within an on/off module. The user has the desire to simply turn on the motors to begin their massage therapy, or have it turned off if wanted to.
Another finding was to have a controlled Peltier device that activates and limits the cooling range. When the device is turned off, it is set at 12C degrees and when the device is turned on, it is at 20C degrees. The Peltier device is also powered by 9V batteries, and it comes with an on/off module as well.
Overall, all the original demands were met on the device and therefor the project is successful.
SCIMDA
Objective: The purpose of the Self-Contained Intravenous Dispensing Aid (SCIMDA) is to aid first responders in quickly and accurately giving IV medication to patients in the pre-hospital setting.
Team Members:
- Jameson Nedza
- Adam Buerger
- Marina Slawinski
- Joseph Soldenwagner
- Matthew True
Advisor: Jacob Rammer, Assistant Professor Biomedical Engineering

Project Presentation:
Tuesday, December 13, 2022
1:30-4:30 pm CST in EMS E250
Project Findings:
Intravenous medications are playing an increasingly important role in the pre-hospital setting. However, paramedics and other first responders currently lack a reliable and effective infusion system that will be useful both in the ambulance and on the scene.
Our team designed the Self-Contained Intravenous Medication Dispensing aid (SCIMDA), a durable, portable infusion system that could withstand the rigors of a first responder’s typical day. The system is made of a series of peristaltic pumps and flowmeters that are controlled by an open-source programming board to accurately dispense up to four medications. The user will find the SCIMDA easy to use with a set dial, 2-digit display, and activation button for each medication line. Swapping out medications is important for situations that are ever changing, so the SCIMDA is designed with a medication tray with slots for 4 medications that can easily be snapped in and out. Additional ease of use features include an easily removable lid to access the medication tray, as well as a hook along one side of the device where a saline bag could be hung in the field.
With limitations on time, budget, and resources, a few components were chosen to be sub-optimal. The peristaltic pumps were not as accurate as desired at the small flow rates required, and the flowmeters were unable to effectively measure the volume output. With a slightly larger budget and more time, a product that is ready to be used in the field could be created.
Civil & Environmental Engineering

Bradford Beach Bathhouse A&A
Objective: The goal of this project is to redesign the Bradford Beach bathhouse, pedestrian bridge, parking lot, surrounding transportation elements, as well as a stormwater system in the project area.
Team Members:
- Jack Angiolo
- Joe Kahoun
- Ezra King
- Rachel Slavic
- Andrew Simon
Advisor: Randy Videkovich, Adjunct Professor Civil & Environmental Engineering
Project Presentation:
Friday, December 9, 2022
11:15-11:45 am CST in EMS 180
Deer District Expansion
Objective: The goal of this project is to develop a fully sustainable artificial intelligent building south of the Fiserv Forum at 1001 Vel R Phillips Ave, Milwaukee, WI.
Project Sponsors: Ashland Capital, Merchant’s Capital and Milwaukee Bucks
Team Members:
- Tyler Hagemeier
- Alex Kogan
- Chris Kudlata
- Ryan Kurudza
- Hayden Pratt
Advisor: Nadine Love-Filer

Project Presentation:
Friday, December 9, 2022
9:45-10:15 am CST in EMS 180
Project Findings:
The Milwaukee Buck’s Real Estate organization sent out a request for proposals in 2019 for development of the vacant space surrounding their stadium. They have not been completely successful in developing the entire space. Most of the vacant lots slated for development fall within a government recognized Opportunity Zone. These zones allow investors to invest into the project space and receive huge tax breaks and other advantages which makes our senior design proposal an extremely lucrative development. Our design project is focused around sustainability, economic feasibility and social acceptance.

Water Street Multi-use Building and Greenhouse Project
Objective: This development project, located along the bank of the Milwaukee River on 1801 Water Street, is built with sustainability in mind.
Team Members:
- Lucas Barthel
- Jaida Lord
- Kiara Lou
- Brett Schnur
- Allen Yang
Advisor: Randy Videkovich, Adjunct Professor Civil & Environmental Engineering
Project Presentation:
Friday, December 9, 2022
10:30-11:00 am CST in EMS 180
Computer Science
Shop-A-Round
Objective: The goal of this project was to create an online web store which allows the user to compare similar products from multiple online vendors.
Team Members:
- Abdullah Al Mamun
- Lisa Isaeva
- Eric Kobelt
- John Poppe
Advisor: Avinash Rajendra, Computer Science
CS Study App
Objective: The goal of this project was to create a web application to help university students stay organized with course/personal projects and homework by using visual study data structures and algorithms.
Team Members:
- Vince Houghtaling
- Sabrina Kramer
- Zac Mui
- Wajahat Shah
- Erik Wenslaff
Advisor: Avinash Rajendra, Computer Science
Project Findings:
When our group started this capstone project, none of us had previously worked with any of the technology we wanted to use. Everything was completely new and took quite a bit of effort from all members to get up to speed in order to produce an end product that we could be proud of. We had decided to create a React app with a (headless) Spring Boot backend.
This semester long project took hours and hours of collaboration between members, researching new ideas and concepts, sharing information and techniques, code reviews, and a lot of refactoring along the way. Throughout this semester, this ignited a passion for front end development as well as a newfound love for React that none of us previously had ever considered. We had each found something we enjoyed doing while contributing to this project, whether that be CSS and styling, creating custom algorithms with complex logic, or page design.
This class was fantastic in helping all members of our team branch out and get “real world” experience that no other class has provided. This allowed us to find new opportunities in the world of Computer Science.
Cybersecurity Unity Game
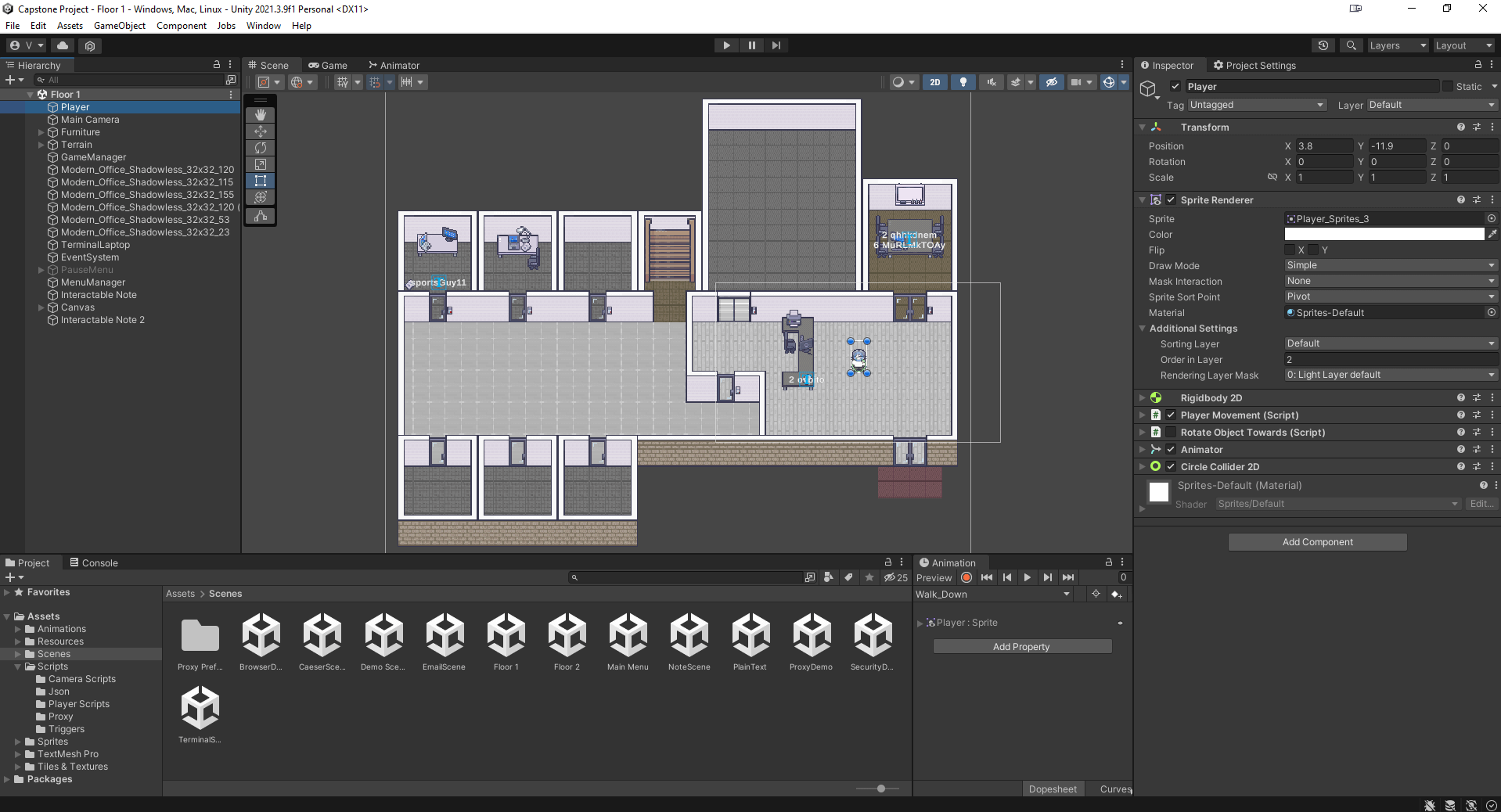
Objective: The goal of this project is to introduce players to some basic cybersecurity concepts that are occasionally used in CTF challenges through a method that doesn’t require taking a formal course.
Team Members:
- Omer Mat
- Brandon Owens
- Kevin Umba
- Brennan Wolters
Advisor: Avinash Rajendra, Computer Science
Project Findings:
As it stands, our project is currently a game in Unity that linearly takes you through some of the systems that you may find in a cybersecurity CTF challenge. You are capable of exploring the limited environments of each level, discovering a few clues, and using the systems to open doors and continue through the game.
We feel as though it does a decent job of introducing players to the systems, but this project has a lot of room for polish. The story still is not in place, and there is a lot of work to do to finish the latter half of the planned levels, but this was a great experience working with a new Unity platform, and designing systems within it.
A Place for Student Engagement
Objective: The goal of this project is to design a centralized location for student engagement. A place for students to meet, form study groups, and stay in touch with opportunities at school.
Team Members:
- Aseem Brickhouse
- Mahmoud Hammad
- Bryce Johnson
- Troy Spielbauer
- Patrick Suminski
Advisor: Avinash Rajendra, Computer Science
Wordeon
Objective: The goal of this project is to create a web application that randomly generates various types of word puzzle games for users to play and to share with friends.
Team Members:
- Hannah Bergrud
- Iynsoo Kim
- Christopher Smeltzer
- Casey Sroda
Advisor: Avinash Rajendra, Computer Science

Project Findings:
Throughout this semester, our team has worked very hard on creating a fun and inviting web experience with our word puzzle website, Wordeon.
We learned a lot about web development and how to work as a team. That being said, beyond the keyboard, we learned a lot about what it means to work as a team. Some of the most important lessons we learned were not syntax and certainly didn’t come from libraries and header files. Instead, we learned how to manage time, lean on each other for support, and highlight and complement each others’ skillsets and capabilities.
As for the computer science component, we learned critical skills about full stack web application development from this project. On the front end, we created an easy-to-read, intriguing design and logo to pull audiences of all ages to our games. As for the games, we made six easy-to-play but difficult to master games that are all word related. It wasn’t easy, but we are all happy with the outcome and are proud to say it represents the culmination of all of our computer science/engineering careers here at UWM.
Campaign Manager Application
Objective: The goal of this project is to build a way for users to create, explore and share campaigns for many different purposes (i.e. fundraising for events, political campaigns, etc.).
Team Members:
- Jinwei Fang
- Kevin Kratzke
- Terrence Lee
- Cal Schmitt
- Bennett Schuster
Advisor: Avinash Rajendra, Computer Science
Project Findings:
Throughout this project, our team learned how to integrate a cloud database with a Django web application. We found it can be tricky to store images in a database, so we had to take time researching the various options available to us. We learned how to effectively split up the work among group members to successfully accomplish our goals during each sprint. Throughout the semester, we figured out how to better plan our sprints in regard to how much work should be attempted in a one or two-week period. The group got increasingly better at code design throughout the capstone project, ultimately creating a site that can be used by many different types of people.
Electrical Engineering
Gas Detection System
Objective: To develop a gas detection warning system capable of sensing harmful levels of CO, methane, propane and smoke. System will be AC powered with battery backup.
Team Members:
- Anahi Cortez
- Brenda Egbe-Osibe
- Jacob Gonzalez
- Jacob Howe
Advisor: William Dussault, UWM CEAS Electrical Engineering

Gesture Smart Light Switch System
Objective: To design a consumer light system enabling the user to control the level of illumination and color balance using only proximity gesture (touchless) movement.
Team Members:
- Keegan Hanson
- Dennis Isein
- Jacob Schimke
- Matthew Tracy
- Matt Widowski
Advisor: William Dussault, UWM CEAS Electrical Engineering

Maritime Sailing Black-box
Objective: To develop a ruggedized maritime black-box system for measuring and recording relevant shipboard data useful for operational efficiency as well as in case of emergency.
Brute Force Team Members:
- Patrick Hollenbach
- Nicholas Holmstrom
- Caleb Marks
- Houa Thao
- Daniel Quiles
Advisor: William Dussault, UWM CEAS Electrical Engineering

Flex Circuit Heater Test Control System
Objective: To design a smart system to control the temperature of a medical CT scanner detector heater element under test using liquid cooling with instrumentation output and user customized test configurations.
Team Members:
- Rayan Alsarran
- David Cooper
- Phil Crownover
- Salintip Fakthong
- Eric Tutkowski
Advisor: William Dussault, UWM CEAS Electrical Engineering and Balaji Sankarshanan, GE Healthcare


Industrial Engineering
Ergonomic Evaluation of a Quality Mechanical Assembly Inspection Cell
Objective: To learn and apply ergonomic methods through evaluating a quality assembly process and suggest ergonomic solutions to improve safety and productivity that will be sustainable for Krones.
Team Members:
- Skylar Gage
- Kevin Liechty
- Maisey Michelz
Project Advisor:
- Madiha Ahmed, Industrial Engineering
Industry Mentor:
- Erin Dugan, Krones USA

Project Presentation:
Thursday, December 8, 2022
3:40-4:05 pm CST
Connected Systems Institute
(East of Golda Meir Library)
Project Findings:
Overall Risk Factors Identified: Heavy Lifting, Static Posture, Carrying, Gripping, Excessive Movement, Awkward Posture(Bending, Reaching, Twisting)
Solution 1: Adjustable Desk/U-Shape Table/Tilt Table
Identified risk factors addressed with this solution: Reaching, Bending
Benefits of this solution: Work surface can be raised/lowered for each operator and Keeps work closer to the body
Solution 2: Tool Shadow Boards
Identified risk factors addressed with this solution: Bending, Reaching, Twisting
Benefits: Raises tool storage to working height, Makes tool selection more convenient, Creates a visual inventory system
Solution 3: Work Cell Redesign
Identified risk factors addressed with this solution: Excess Movement, Heavy Lifting
Benefits: Reduces walking/carrying, safer, more efficient, and improved flow
Solution 4: Bench Scale
Identified risk factors addressed with this solution: Heavy Lifting
Solution 5: Roller Conveyor System
Identified risk factors addressed with this solution: Reaching, Bending, Excess Movement, Carrying
Benefits: Reduces walking, An operator stated that he liked another roller conveyor set up that another area has already implemented, Eliminates bending/reaching to pick up, FIFO, and gravity fed
Solution 6: Manual Lift/Pallet Stacker/Lift table
Identified risk factors addressed with this solution: Bending, Reaching, Twisting, Heavy lifting
Benefits: Heavy/large items can be raised to standing height, manual lift is already in use in another department
ISO 9001 Audit of Krones Machine Shop
Objective: The goal of this project is to learn about the ISO standard, understand its importance, plan and perform an ISO 9001 audit of the Krones Machine Shop, and identify non-conformances and opportunities for improvement.
Team Members:
- Christopher Burmeister
- Matthew Mercer
Project Advisor:
- Iftekharuddin Khan, Industrial Engineering
Industry Mentor:
- Logan Essers, Krones USA

Project Presentation:
Thursday, December 8, 2022
4:05-4:30 pm CST
Connected Systems Institute
(East of Golda Meir Library)
Project Findings:
Inventory Traceability
Objective: To create an inventory traceability solution to record and maintain physical inventory locations.
Team Members:
- Easton Dobson
- Colin Haagensen
- Ryan O’Day
Project Advisors:
- Dah-Chuan Gong, Scientist II, Industrial Engineering
- Wilkistar Otieno, Associate Professor and Chair
Industry Mentor:
- Steve Coolidge, AAASE Sales & Engineering


Project Presentation:
Thursday, December 8, 2022
4:40-5:05 pm CST
Connected Systems Institute
(East of Golda Meier Library)
Project Findings:
AAASE Current Inventory Collection Process Statistics:
- Time to locate parts in the facility:
- Minimum: 1 minute
- Maximum: 62 minutes (or give up)
- Mean: 11.1 minutes
- Standard deviation: 15.40 minutes
AAASE Future Inventory Collection Process Statistics:
- Time to locate parts in the facility using new map and process:
- Mean: 2.28 minutes
- Average Time reduction per move: 8.82 minutes
- Average parts moved per day: 70
- Saved hours per year ≈ 3500
- Total Yearly Sales ≈ $30M
- Total working days per year = 250
- Total hours per day = 24
- Number of Work Cells = 23
- Total Capacity = (250*24= 5280hours) * 23 = 121,440 hours
- Total Capacity = 121,440
- Saved hours / total capacity = 2.8%
- Cost Savings per year (Strictly Labor Hours): $76,256
- Saved hours * Total yearly sales = $840,000
Benefits of implementing Bar-Coding System:
- Streamlines the process of identifying parts and transferring information
- Saves time when labeling stock
- Parts can be tied to a location
- Decreases the time spent inputting data
- Part numbers, work order numbers, locations, and more can be scanned and uploaded instantly
- Reduce human error from manual data entry
- Mitigates search for product
- Reduces time to audit inventory
Materials Science & Engineering
This is a two-semester program that completes in Spring 2023. There are no projects for Fall 2022.
Mechanical Engineering

3D Printed Robotic Arm
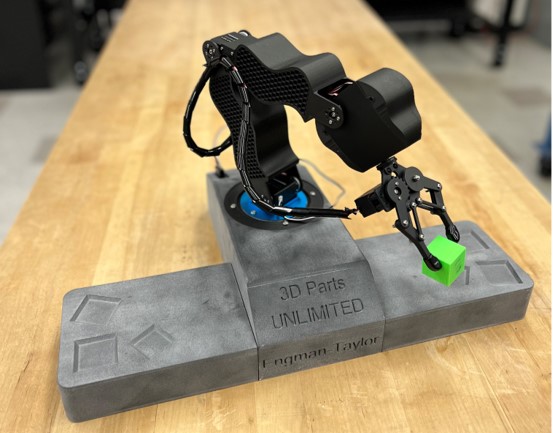
Objective: The task for this project was to create a robotic arm whose mechanical structure was made entirely from 3d printed components. The 3d printed robotic arm is to have an eye catching design that includes lattice structures and other unique features that showcases the 3d printing capabilities of Engman-Taylor. The arms main purpose is to be taken along to trade shows and be a showpiece for the Engman-Taylor booth.
Team Members:
- Matthew Bringe
- John Carran
- Daniel Cramer
- Brent Goeden
- Taylor Goodno
Project Advisor: Mohamed Yahiaoui, Senior Lecturer Mechanical Engineering
Industry Mentor: Jordan Nowak, Engman Taylor

Project Presentation:
Tuesday, December 6, 2022
3:15-3:45 pm CST in EMS E250
Project Findings:
The objective of this project was to design a working robot arm with 3D printed materials making up the main structure that could be used at trade shows for Engman-Taylor. Based on this usage, the arm needed to move with six degrees of freedom, fit in a 2 x 1.5 ft area on a table, move objects between two locations, and have an eye-catching design that uses 3D printed materials and capabilities, such as lattice structure.
The final design includes a stepped base to house the main rotational section of the robot, and two unique looking linkages with lattice structure. Due to a focus on the mechanical aspects of the design, a six degree of freedom robot arm kit was purchased for the purpose of using the motors and programming solution from the kit. Once the final Creo assembly model was finished, all the parts were printed by Engman-Taylor on the Markforged Mark II 3D printer except for the base pieces which were printed on the HP PA12 printer.
The print and assembly were successful, and the robot was able to pick up a block and move it around manually. With more time, an automated program could have been created to accomplish the task of moving objects between two locations.
Automatic Cable Tie Looper
Objective: HellermannTyton is a global leader in cable management products. Their products have proven to be reliable with consistency and strength. The purpose of this project is to design a mechanism that can automatically loop a cable tie. This looped cable tie can then either be used in a tensile test to test the strength of the cable tie or be used in a slippage test to ensure quality cable ties. The data gathered from these tests can then be used to find weaknesses and inconsistencies within their cable ties.
Team Members:
- Paul DeMuth
- Max Engh
- Justin Langwinski
- Riley Melendy
- Justin Quilapio
Project Advisor: Mohamed Yahiaoui, Senior Lecturer Mechanical Engineering
Industry Mentor: Joey Friedli, HellermannTyton
Project Presentation:
Thursday, December 8, 2022
2:30-3:00 pm CST in EMS E250
Project Findings:
This project served as a major learning opportunity for the group. Not all requirements were met, but there was a lot of progress made towards the end goal. The overall movement of the entire system was a success, even though it wasn’t dialed into the correct locations. Another success is the mechanical design of the prototype can loop any length of cable tie. With the overall project being a failure, there is hope that with more time spent testing and revisions made in the code, a finished product that meets all Critical to Quality requirements can be created.
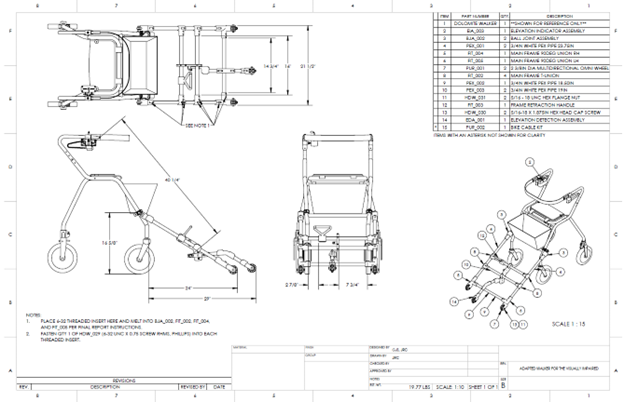
Guide Cane Rollator Attachment
Objective: Individuals with both visual impairments as well as issues with walking require a special solution to allow them the same freedom and mobility as an abled person. The goal of this project is to develop an effective, economical attachment for a Rollator that mimics the functionality of a guide cane in order to provide this freedom.
Team Members:
- Joseph Ciborosky
- Dylan Endries
- Alex Nienhaus
- Gabriel Stern
- Joshua VanEgeren
Project Advisor: Mohamed Yahiaoui, Senior Lecturer Mechanical Engineering

Project Presentation:
Tuesday, December 6, 2022
2:30-3:00 pm CST in EMS E250
Project Findings:
Approximately 14% of adults in the United States suffer from difficulty moving and an additional 5% suffer from difficulty seeing.
It follows that approximately 2.3 million Americans suffer both movement impairment combined with vision impairment. While there are many systems and solutions in place to assist those with various impairments live normal lives, there are still gaps in the market to assist those with more complex disabilities. The task was to combine the functionality of a rolling walker with that of a blind person’s white cane to assist the clients of Vision Forward Association live more independently. After defining Critical to Quality requirements through the Voice of the Customer, several possible designs were developed to solve this problem. By combining several aspects of these designs, a prototype was created for Vision Forward that met all Critical to Quality requirements.
Pin Sorting System
Objective: The goal of this project is to create an automatic sorting system for mixed brass lock pins of differing lengths. The system must be self-contained within dimensions of 16” x 16” x 16”. It must also require minimal user input, sort 20 pins per minute, load and unload efficiently, and cost less than $5000 from development to finished product.
Team Members:
- Isaac Gonzalez
- Jordan Piontkowski
- Matthew Rabiega
- Jacob Weisbard
Project Advisor: Mohamed Yahiaoui, Senior Lecturer Mechanical Engineering
Industry Mentor: Jamie Connelly, Master Lock
Project Presentation:
Tuesday, December 6, 2022
4:45-5:15 pm CST in EMS E250
Project Findings:
Based on testing and the final virtual design of the pin sorting device, it can be concluded that the proposed method of pin sorting by using images of the pins against a backlight should be successful. This would likely require quite a few false negatives, as the difference in the amount of darkness that the pins produce when put against a backlight is minimal. Strict margins when determining what is acceptable and what is considered a false negative would be the reason for all of the false negatives. This would, however, result in zero false positives, and based on the cost of building the units, all of the critical to quality items should be met, whether it’s with one unit or multiple. Overall, it was found that this method of pin measurement should be successful and could likely be proven true with further testing.
Rotating Assembly Lift
Objective: Team Generac is creating a solution to increase efficiency and safety of assembling and installing of a deck onto a riding lawn mower. To achieve this our design will have a rotating component to assemble the deck more efficiently by having access to the deck at all angles. It must be able to raise and lower the deck with complete control to assist installing it. Lastly it must be moveable to transport the deck from the point of assembly to the point of installing the deck to the riding lawn mower. To do this, we will be outsourcing a motorized lift cart with a rotating component included and designing a fixture to hold the deck in place.
Team Members:
- Nicholas Joers
- Noah Lentz
- Daugvydas Mackonis
- Samuel Maule
- Paul Seaman
Project Advisor: Mohamed Yahiaoui, Senior Lecturer Mechanical Engineering
Industry Mentor: Mike
Project Presentation:
Thursday, December 8, 2022
3:15-3:45 pm CST in EMS E250
Project Findings:
In summation, the project was a success as the team designed and delivered a solution that met all its CTQ’s and satisfied the customer’s design needs. As a disclaimer, all the CTQ’s were only met theoretically, as no functioning prototype was built. That said, the customer has two ways to move forward should they decide to use the recommended design.
Generac can use our schematics and design, with a series of additional tasks to make the design a reality. All the parts and components need to be purchased, fabricated, and assembled. After assembly, it will need to undergo a multitude of tests and, potentially, a redesign process once those tests have been completed. The benefit and downside to all of this is that it could be done in-house. Generac could save costs and get the design they want by using their own resources and time.
The other solution we provided would outsource the design and manufacturing to another engineering company named RonI. This vendor could modify one of their existing designs to match the needs of this one. The deliverables would include a finished mechanism and all the testing conducted to certify its needs and functions.
Smooth Ride Caster – Medical Device Transportation Assisting Feature
Objective: This project is sponsored by GE Healthcare and initiated by Ramune Auzelyte. The team was tasked with designing a mechanically charged 5th caster wheel that would be integrated into current baby incubator units (Giraffe OmniBed Carestations). This caster will help initiate the movement of the incubator units, whose large size and weight can make operation difficult and awkward. The caster must be able to maneuver a variety of surfaces, bumps, and inclines/declines of up to 10 degrees.
Team Members:
- Cameron Ahles
- Vi Do
- Michael Johnson
- Ryan Lindquist
Project Advisor: Mohamed Yahiaoui, Senior Lecturer Mechanical Engineering
Industry Mentor: Ramune Auzelyte, GE Healthcare

Project Presentation:
Tuesday, December 6, 2022
4:00-4:30 pm CST in EMS E250
Project Findings:
The team was tasked with designing a mechanically charged 5th caster wheel that would be integrated into baby incubator units. This caster was intended to help initiate the forward movement of the units, whose large size and weight made operation difficult and awkward. The caster had to maneuver a variety of surfaces, bumps, and inclines/declines of up to 10 degrees. The wheel needed to be constructed out of an antistatic material to avoid accidental static electricity discharge to the incubator.
Based on these requirements, the team systematically created and evaluated a design concept that was driven by a care for the needs and wants of the customer. The team kept contact with Ms. Auzelyte throughout and invited input of all kinds to tailor the design to fit the expectations of the end-users and stakeholders. The team modeled the design in Creo Parametric to help visualize the key components, ensure proper fitting, and to set up FEA analysis.
A prototype model was produced, and cost analysis performed to evaluate economic viability. FEA testing showed the design would survive expected limits, while the prototype performed as expected demonstrating the viability of the design. The testing also showed opportunities for improvement in future iterations to meet and exceed the customer’s needs.

Become a Senior Design Project Sponsor
Contact: Mark Meier, College of Engineering & Applied Science Office of Research: meiermd@uwm.edu